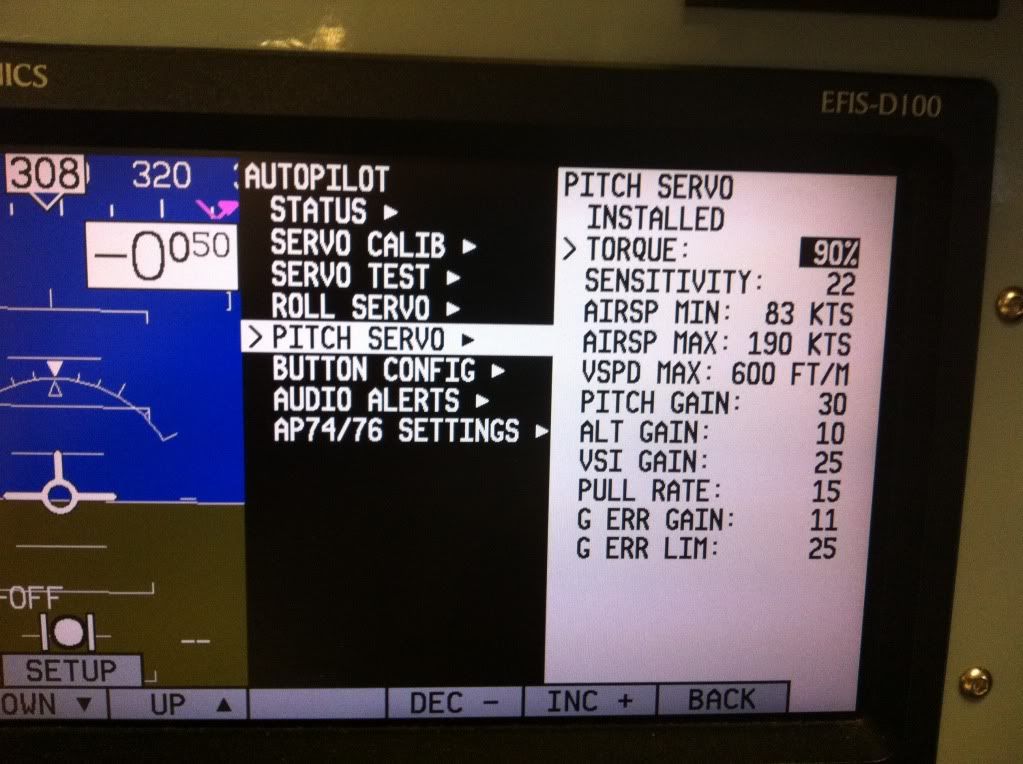
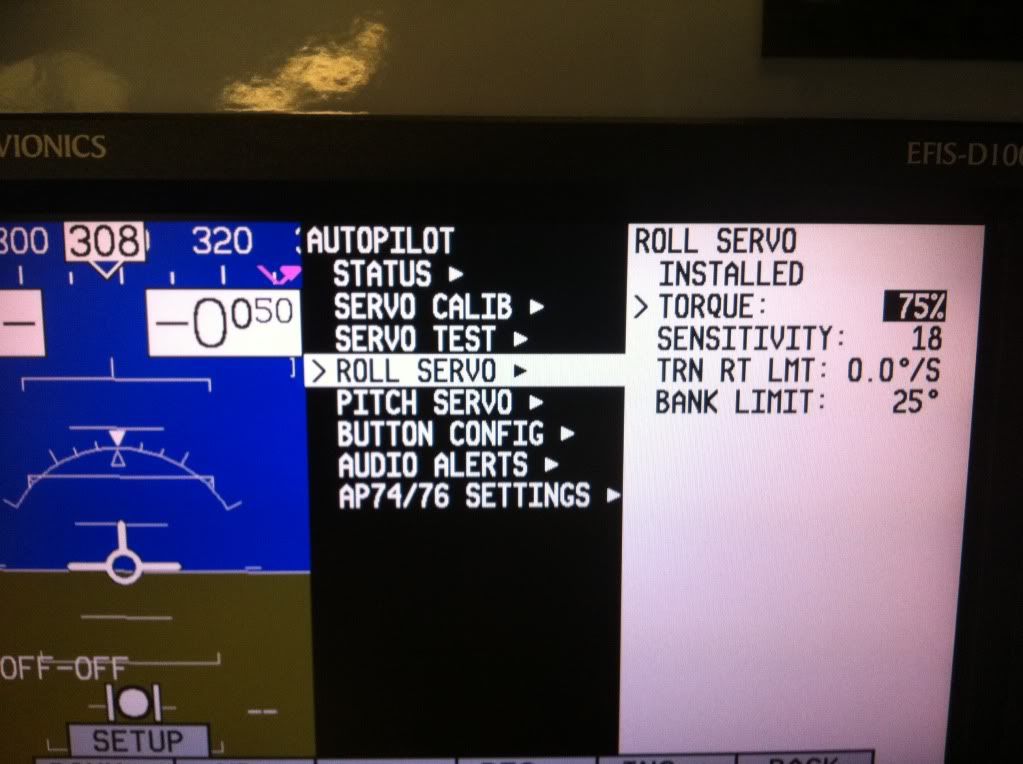
I had plenty of time to feel out the autopilot on the trip to/from Oshkosh. I have an RV-10 with SV42 and SV42T. Roll servo is set to middle hole on arm.
I am using the default values, which i don't have in front of me at the moment. However, I mostly played with the sensitivity value first. Torque is both at 100%.
I had sensitivity tuned up to 12 on pitch and roll. Over some thermals over Colorado, Nebraska and Iowa, my friend complained about the jerkiness of the AP jerking the plane around. I started to lower the sensitivity settings down to 5 or 6. The ride was definitely more comfortable here, as the plane was allowed to roll with the ups and downs instead of trying to instantaneously correct.
However, the problem with sensitivity=5 was the plane would roll left, then right, then left, then right. Pitch would go up then down up down up down. It seemed like the AP would target the target track or altitude, but then overshoot it. It would get into a cycle, constantly trying to find the target.
It needed a shock absorber to help it. By the end of the trip, i settled on sensitivity=6 and i would manually set the heading and or pitch. Effectively, i was acting as the shock-absorber for the AP so that it wouldn't continually cycle back and forth. Once on target, the AP could hold fairly well until taking a bigger turbulence hit or so.
Also, I had to continually try to dampen turbulence with rudder for a more comfortable ride. I would love to see an auto yaw servo!
Jae
 but a SV42T and set at 100%
but a SV42T and set at 100%